Important concepts of Operating Systems
The operating system is a set of programs that acts as an interface between a User and Hardware. It is necessary to reduce complexity 1. User mode 2.…
On this page (23)
- Modes in an OS
- Components
- Components
- Creating of New Process
- Zombie & Orphan Processes
- InterProcess Communication(IPC)
- Types
- Scheduling Algorithms
- Hybrid of these are there
- Types
- Solutions
- handling
- Mapping of instructions
- Types of allocation
- additional bits of Page table
- Replacement algorithm
- Disk
- Scheduling in Disk
- How files are stored (Linux File System)
- Hard Link
- Soft Link
- Components
- Components involved in protection
What is it #
The operating system is a set of programs that acts as an interface between a User and Hardware. It is necessary to reduce complexity
Modes in an OS #
- User mode
- Supervisor mode (i.e. Kernel-mode)
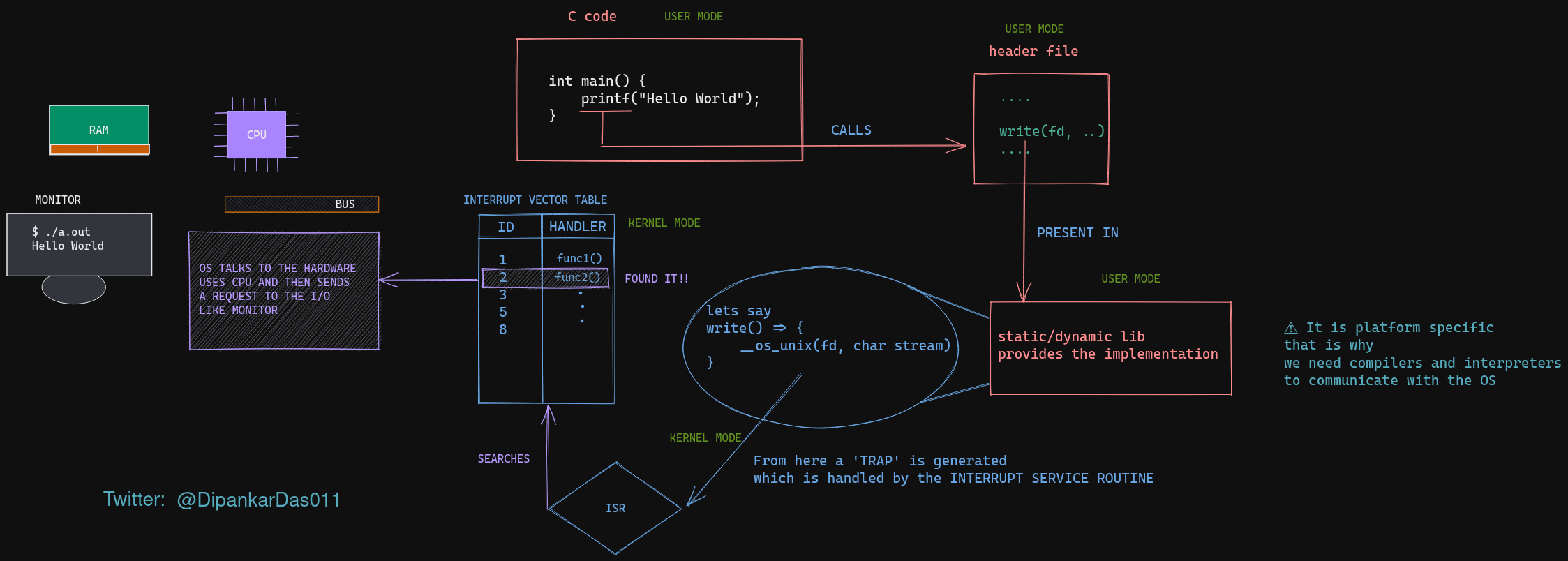
user applications are provided APIs by the OS to talk with the hardware.
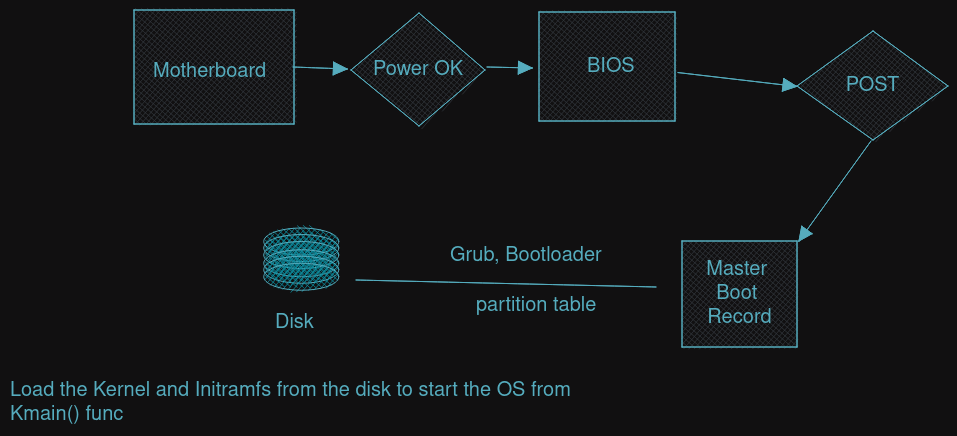
How does the Computer Boots
for example. How the print statement is evaluated in an Operating System
Components #
- Process management it manages the processes and their resources
- File management it manages the file Read, Write, Execute, Permissions and sharing
- Memory management it counts how much is free, makes memory available & deadlock, and memory isolation, mapping
- I/O management it handles interrupts, device drivers, bus, buffers, etc
What is Process #
a process is the instance of a computer program that is being executed by one or many threads. OS represents each process tracked with PCB (Process Control Block)
- Process ID (Linux, it is represented by 16 bits)
- Parent process ID
- Process state
- CPU State
- Scheduling information
- Memory information
- Open file information
Components #
- OS Resources it contains the information
- Open file information
- Socket information
- Scheduling algorithm to be used
- PID, etc.
-
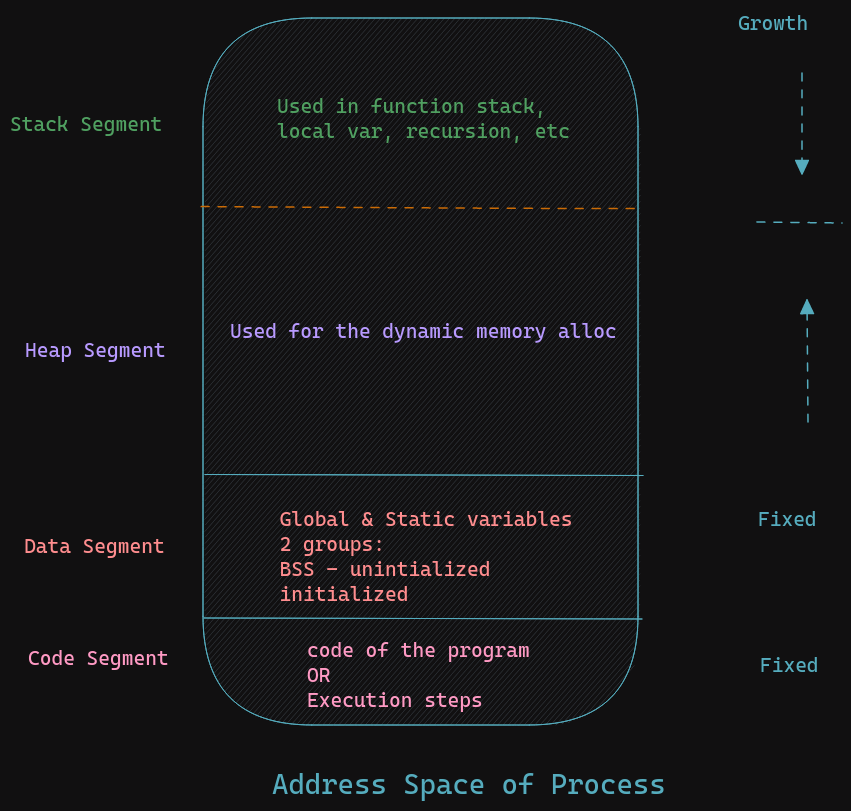
Address Space
-
CPU State all the CPU registers associated with the process it stores the current state PC=program Counter IP=Instruction pointer SP=stack pointer it is useful when there is a context switch as the CPU stores the current state of the process into this segment and after storing it then it switches to the new process
Creating of New Process #
we can use fork() to create a child process
it's important to note that when fork() is invoked, the parent process address space is copied to the child process
Zombie & Orphan Processes #
Orphan Process - When the parent process gets completed before the child process then child process control is transferred to the init process in Linux kernel and so the child has a parent process ID of 1 or in more recent Linux kernel it is 2 or 3
Zombie Process - When the parent process is busy in some I/O or in a sleeping/suspending state then if the child process gets completed then the parent process does not know about
we can use the wait() in parent block so that parent waits for its child process to get terminated before it gets terminated
InterProcess Communication(IPC) #
Here, we use a pipe structure to communicate between processes it uses 2 heads a read and write
in Golang, channel is used to communicate in a GoRoutine
Process scheduling #
the program that takes the responsibility of moving process from one queue to another
Types #
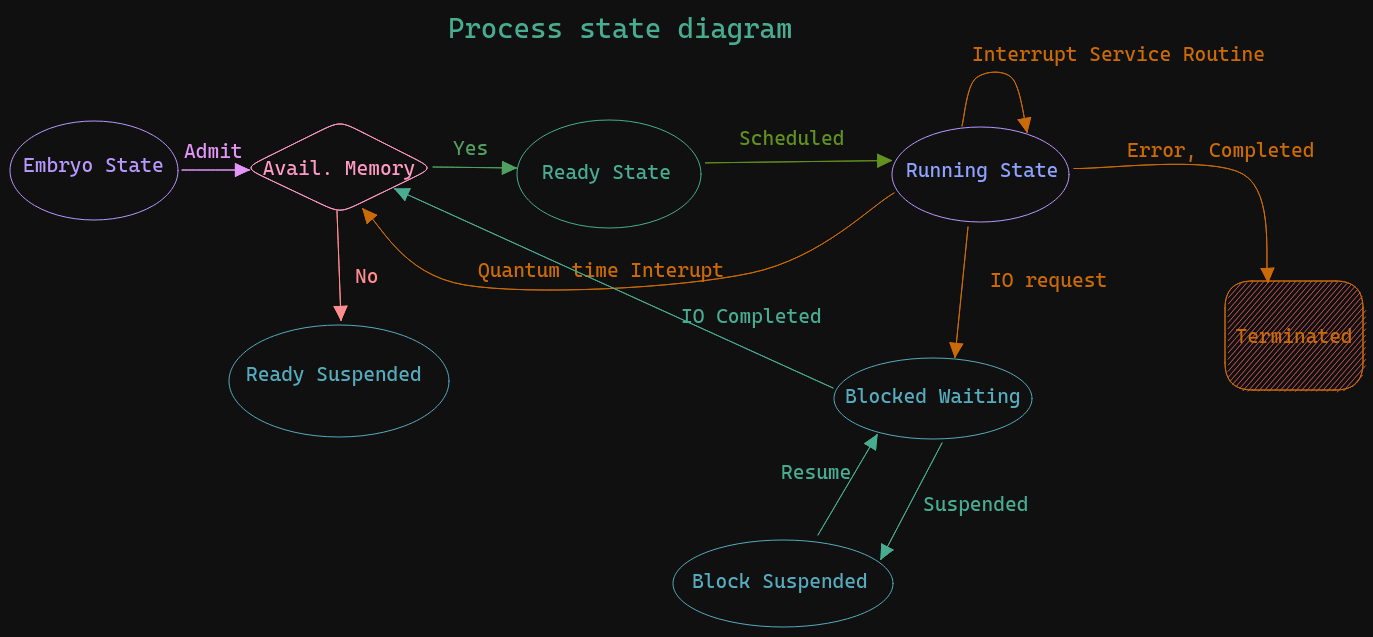
- Short Term Scheduler - it decides which process moves from Ready queue to running state(CPU), it is called by:-
- Interrupt Service Routine
- When a process terminates
- I/O operation is invoked
- Long Term Scheduler - it decides which process moves from Embryo State/Ready_Suspended state to Ready Queue
- Mid-Term Scheduler - used for swap area. But some don't use as long term can be extended to fit its purpose
Context switch - mechanism to change the control of the CPU from one process to another
Preemptive - control can be transferred to another process even if the process is not completed
Non-preemptive - control can be transferred to another process when the process is completed
Scheduling Algorithms #
-
FCFS (First Come First Serve) [nonpremeptive] the process which comes first gets the CPU first (arrival time)
-
SJF (Shortest Job First) [premptive/nonpremptive] it is not practical scheduler decides according to the remaining burst time required by the process
-
Priority-based [premptive/nonpremptive] each process is given priority the lower priority process is given the preference to avoid starvation we can use the aging method where at each clock cycle the priority of processes in queue is reduced
-
Round Robin [premptive] Here there is a fixed Quantum time it's like a circular queue where each process gets a Qt amount of time, if not completed then it is reinserted at the back and the process after this is given to the CPU it has the least waiting time. So used in interactive tasks (UI)
Hybrid of these are there #
- Round Robin with priority Here it compares the priority of the runnable process with other runnable processes
- Multilevel feedback Queue ready queue is divided into >= 2 queues 1st queue = Highest Priority (Interactive processes like UI) latest queue = Lowest priority (Background processes) and another queue for the (system process)
Thread #
It is a lightweight process Every thread uses the address space of its parent it takes significantly less time and resources as compared to creating a new child process each thread has its own:
- PC (Program Counter)
- CPU state
- Stack (Address space) the stack is stored in the parent process Heap address space
Types #
- user thread - it is in user space and is handled by the programming language
- kernel thread - it is in kernel space and is handled by the Operating System to execute a user thread, it is transferred to kernel threads to execute it
Process Synchronization / Concurrency #
There is a problem when there are > 2 processes; execute simultaneously and using common resources then there are inconsistencies This is Race Condition
there are 3 steps in each process
acuire_lock()
----
Critical section # where all the program logic happens
----
release_lock()Solutions #
- Software Lock(Peterson's 2 process solution) If there are P0 and P1 processes, then P0 gives chance to P1 and vice-versa, thereby maintaining consistency
// Process 0
flag[0] = True
turn = 1;
while (flag[1] == True && turn == 1);// Process 1
flag[1] = True
turn = 0;
while (flag[0] == True && turn == 0);- Semaphores Semaphore is a variable along with 2 operators called wait() and signal() to achieve synchronously ** Types**
- Binary - only one process at a time can enter the critical section
- Counting - more than one process at a time can enter the critical section If one or more processes are waiting to get their turn thereby CPU burst time is wasted to check them, so it is a spin lock situation to overcome, we need the waiting queue
Bakery using semaphore #
multiple producers can put their item on the rack, and multiple consumers can eat item
// Producer
wait(empty)
wait(mutex)
insert(rack, p_item)
signal(mutex)
signal(full)
// Consumer
wait(full)
wait(mutex)
remove(rack)
signal(mutex)
signal(empty)
Reader & Writer method #
When one or more process enters reading mode, then no process can enter write mode in the critical section and when the write mode process is inside the critical section, no read mode process is allowed to enter only 1 write mode by N read mode
// writer
wait(wr)
write()
signal(wr)
// reader
wait(mutex)
count++
if (count == 1)
wait(wr)
signal(mutex)
read()
wait(mutex)
count--
if (count == 0)
signal(wr)
signal(mutex)Dinning philosopher #
# philosophere
think()
# aquire_chopsticks
eat()
# release_chopsticksenum STATE{
HUNGARY, EATING, THINKING
}
semaphore p[5] = {0}
mutex = 1
int state[5]
void philosopherWork(int i) {
while (1) {
think(i)
takeChopsticks(i)
eat(i)
releaseChopsticks(i)
}
}
void takeChopsticks(int i) {
wait(mutex)
state[i] = HUNGARY
test(i)
signal(mutex)
signal(p[i])
}
// 4 Philosopheres
void test(int i) {
if (state[i] == HUNGARY && state[(i+1) % 5] != EATING && state[(i+4) % 5] != EATING) {
state[i] = EATING
signal(p[i])
}
}
void releaseChopsticks(int i) {
wait(mutex)
state[i] = THINKING
test((i+1) % 5)
test((i+4) % 5)
signal(mutex)
}- Monitors it is a high-level programming language construct to achieve synchronously Block
- lock
- shared variable
- atomic function
- conditional variables
Deadlock #
a set of processes are said to be in deadlock if every process belongs to this set holds a resource and waiting for another resource that is currently held by another process belongs to this same set
handling #
- Deadlock prevention - prior to deadlock make anyone of the following truth:
- no mutual exclusion
- no hold & wait
- no preemption
- no circular wait
- Deadlock avoidance - prior to deadlock dynamically verify the resource allocation state using:- Allocated resource count, available resources, need of that process
- single instance resource - resource allocation graph
- multiple instance resource - bankers algorithm
- Deadlock detection - deadlock occurred the system has to know the information to find deadlock like - allocation, request, availability
- single instance resource - Wait for graph
- Multiple instance resource - Banker's algorithm
- Deadlock recovery - deadlock occurred how to resolve it
- assume that there is no deadlock
- resource preemption
- process termination (all or some selected till it is deadlock-free)
Memory management #
functions of it:-
- keep track of free space
- allocation memory to process whenever they need it
- protection of memory of one process from another
creation of executable file
- without linking
- with linking
- static linking - the library files are added after the linking process
- dynamic linking - the library files are fetched as needed during execution
Virtual Memory - it is used to expand the available memory resource than it is.
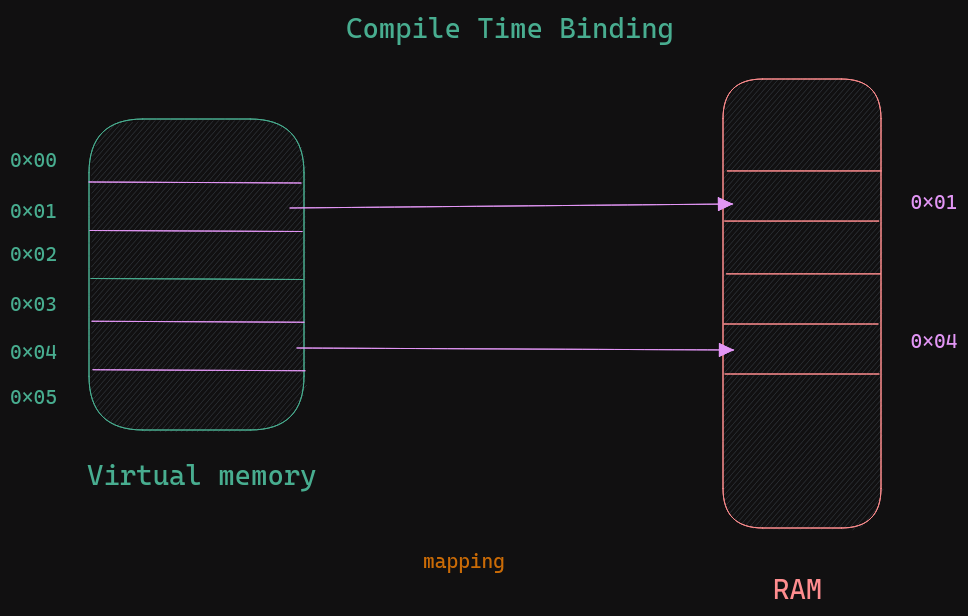
Mapping of instructions #
-
Compile time-binding each line mapped to the physical memory The compiler must know where the space is available
-
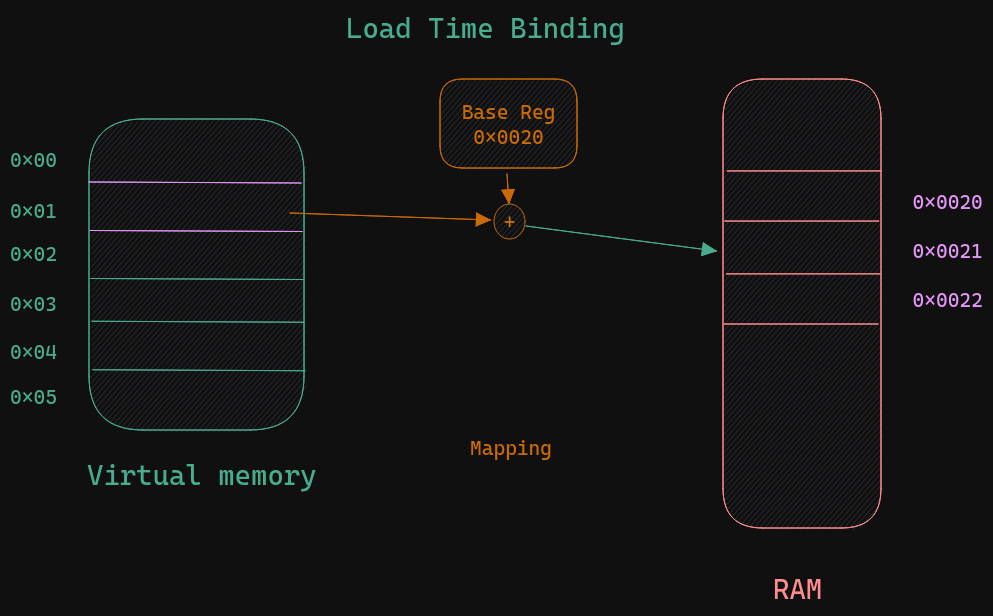
Load time-binding Base register is provided by the OS and Base register + index gives the physical memory
-
Execution time-binding during the execution, the instruction can move from one memory location to another
Types of allocation #
logical address - it is the address generated by the CPU which is the virtual memory location
page table - it is used for mapping virtual page number <-> physical frame number
number of bits to represent page number = number of pages; same for the offset where number of lines or size of each page
each page size == each frame size
- Monoprogramming systems (compile time-binding )
- Multiprogramming
-
Contiguous
- Fixed partitioning whole physical memory is divided in fixed-sized chunks. It causes internal fragmentation
- Variable partitioning Physical memory is not divided, but the program is stored in a continuous memory location of its size. It causes external fragmentation
-
Non-contiguous
-
Paging
-
Single page table
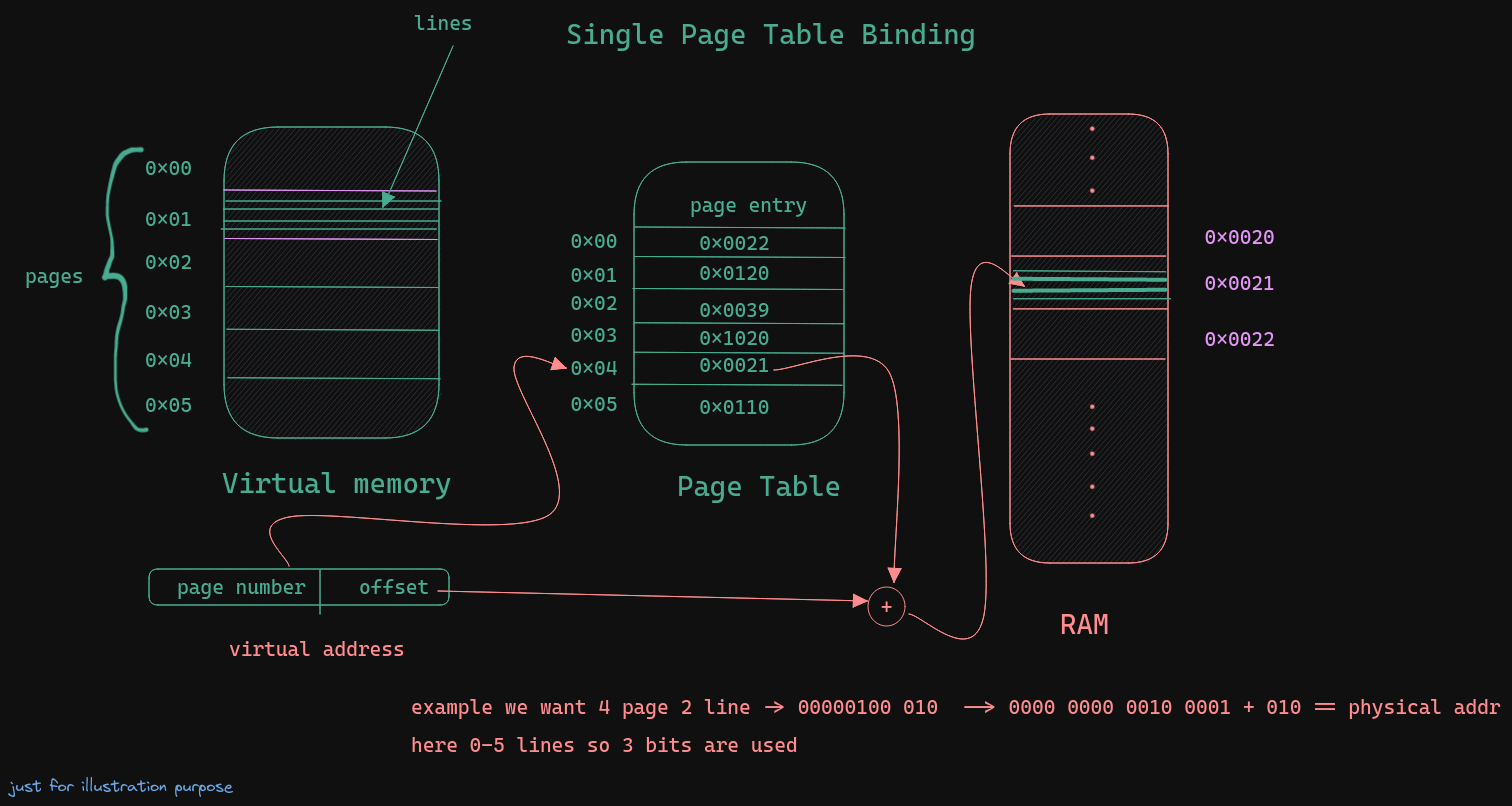 the page table is typically stored in the RAM and most recent in the MMU. TLB (Translation Look-Aside Buffer) act as the fastest cache for page number with corresponding frame number, it reduces the access time. Very fast cache directly on the CPU that caches most recent virtual to physical address translations. Implemented as a fully associative cache
the page table is typically stored in the RAM and most recent in the MMU. TLB (Translation Look-Aside Buffer) act as the fastest cache for page number with corresponding frame number, it reduces the access time. Very fast cache directly on the CPU that caches most recent virtual to physical address translations. Implemented as a fully associative cache -
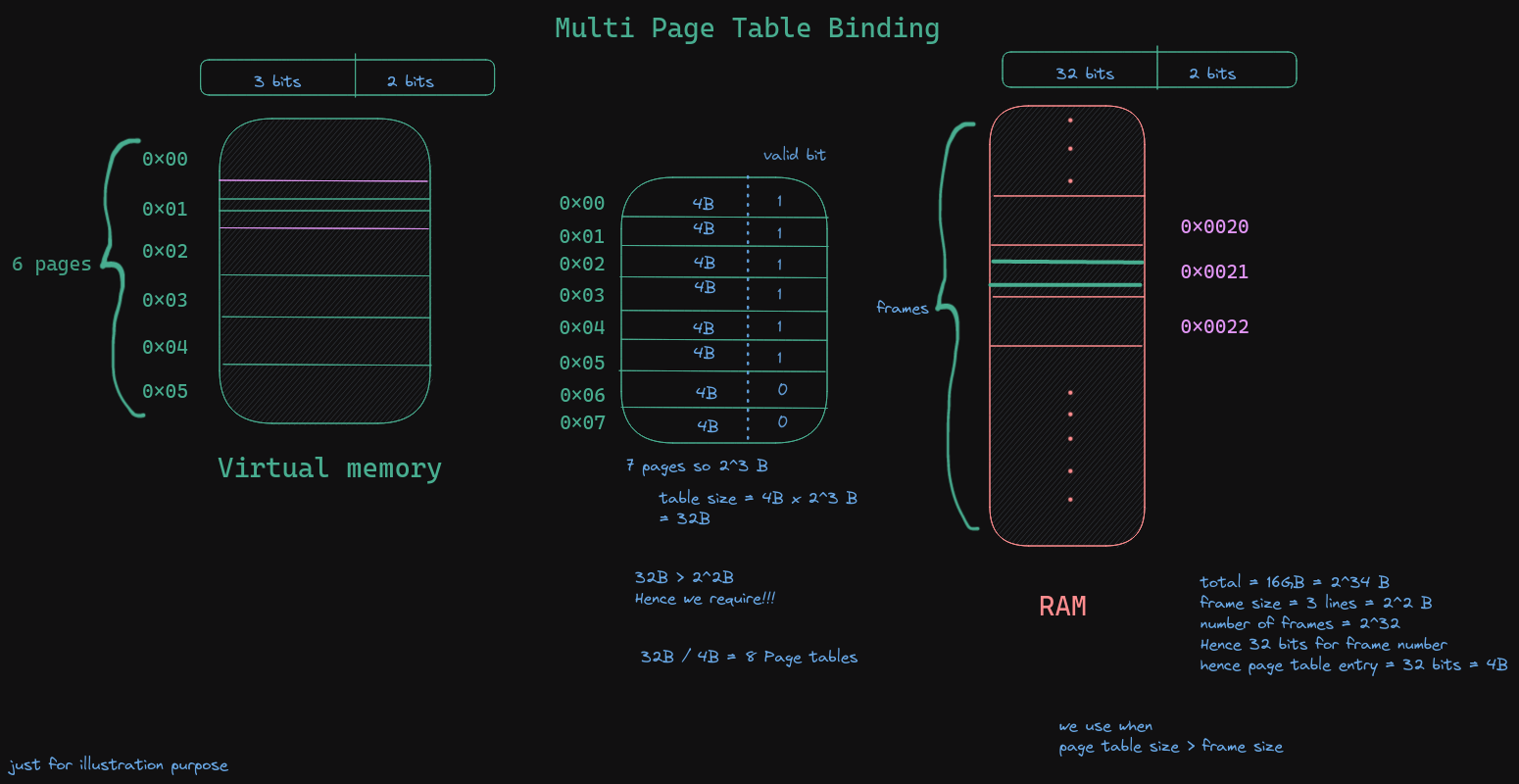
Multiple page table
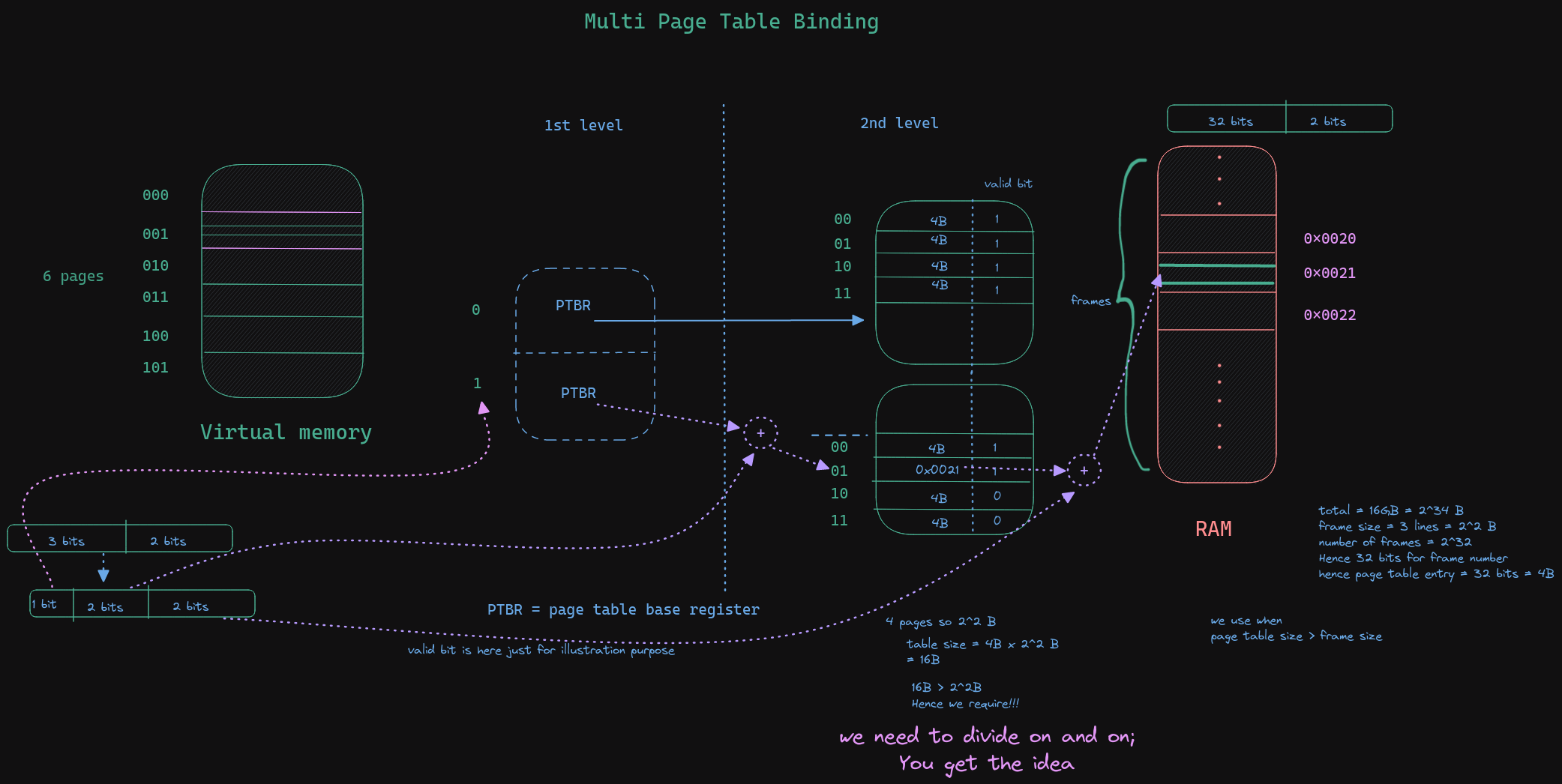
-
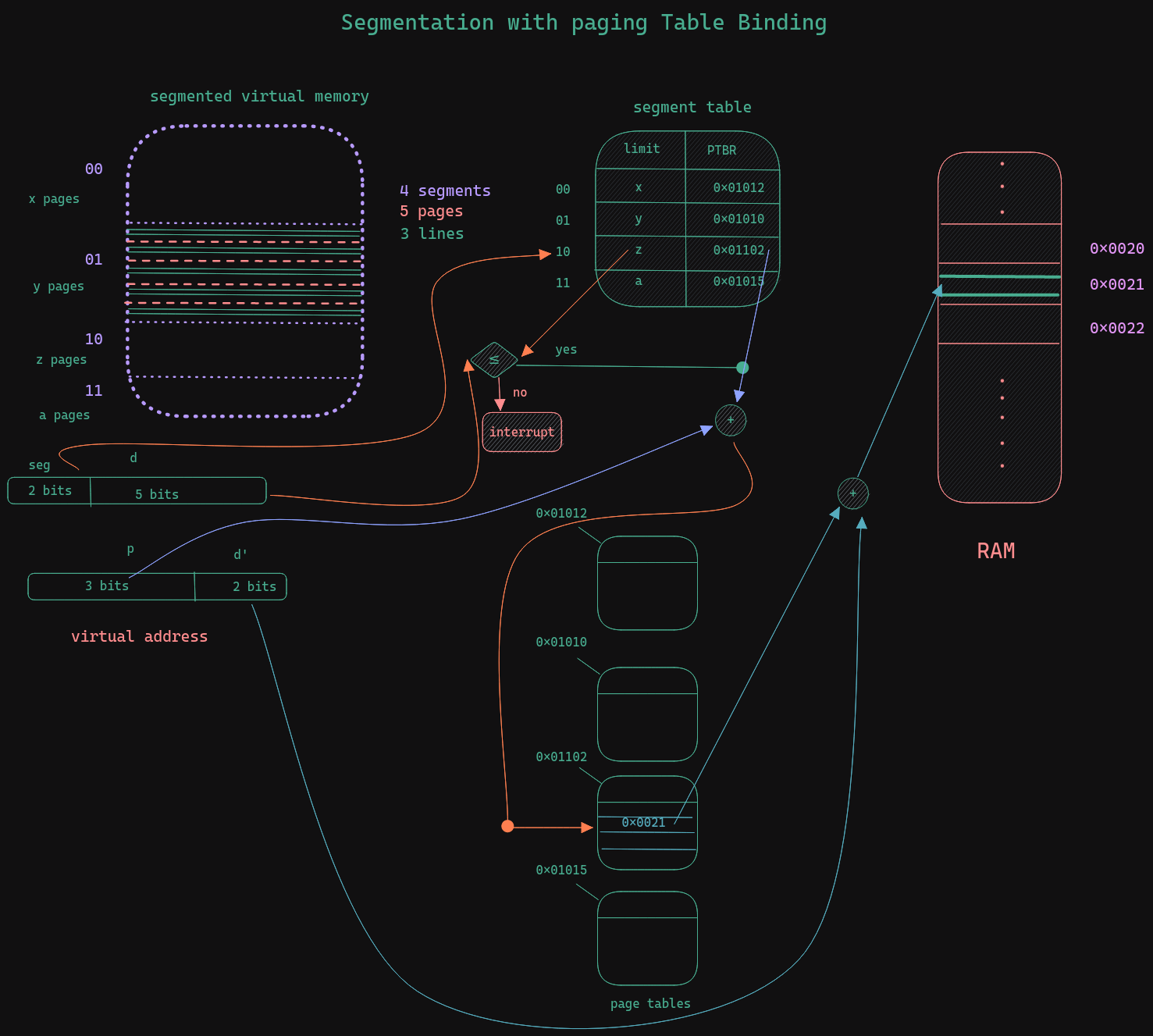
-
Segmentation with paging as the process address block is segmented into 4 segments and each segment is divided into pages and each page into lines d is decomposed into p and d'
-
additional bits of Page table #
-
valid bit 1 -> valid if the program uses the page, otherwise 0
-
protection bit read, write, execute code segment must be read, execute data segment must be read, write
-
Reference bit whether this page is currently accessed in CPU or not even reading or writing is known here as refereed
-
dirty bit if that page is modified in the ram but not written back to the virtual memory, then dirty bit is set to 1 so when the page has to be removed from the ram then: if the dirty bit == 1 then it is saved to the swap area else it is saved to the hard drive
Replacement algorithm #
it happens in demand paging when during the segmentation paging the page is not present in the ram then "PAGE FAULT" exception is thrown OS handles the exception by bringing that page from the disk/swap -> RAM
- FIFO - the first one in has to be replaced
- optimal - in the near future, whichever page is not going to be used
- LRU - replace with the page which has not been used recently
- Approx LRU
- uses the reference bit. If reference bit = 0 then replace it; otherwise not
- Additional reference bit algorithm
- Second chance algorithm
- Counting algorithm
IO #
Disk #
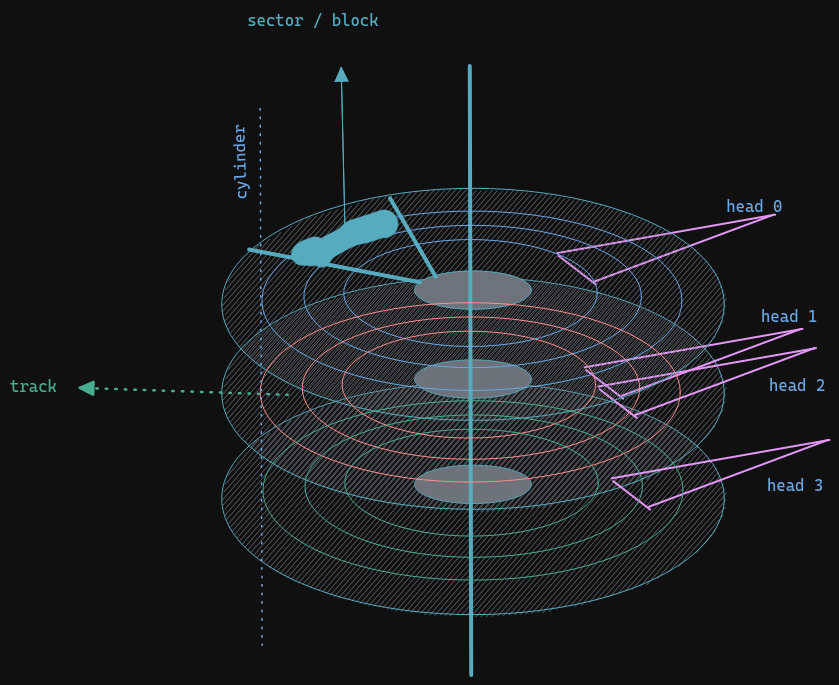
- sector/block - A sector is the basic unit of data storage on a hard disk
- Head - this is the surface of the platter in a disk, there are 2 surfaces
- track - a combination of sectors, creating a ring
- cylinder - all the tracks under the head at a given point on all surface
Scheduling in Disk #
Disk Latency = Seek Time + Rotation Time + Transfer Time the goal is to Reduce seek time Scheduling technique:
-
FCFS the first request is served
-
SSTF the least movement of the disk arm from its current position
-
SCAN start scanning in the same direction till 0 and then scan in the reverse direction
-
LOOK like scan, but does not go to the extreme ends.
-
C-SCAN similar to SCAN but moves in one direction L->R or R->L
-
C-LOOK similar to LOOK but moves in one direction L->R or R->L
How files are stored (Linux File System) #
it uses Inode where single Indirect, double Indirect, triple Indirect is by multi-level indexing
// just to give an ideal
struct prem {
int read, write, exec;
};
struct file {
struct prem mode;
String owner;
time timestamps;
int block_size;
int count;
struct fs *directBlock;
struct fs_1 *singleIndirect;
struct fs_2 *doubleIndirect;
struct fs_3 *tripleIndirect;
};
struct fs {};
struct fs_1 {
struct fs **data; // array of pointers for the implementation of m binary tree
};
struct fs_2 {
struct fs_1 **data; // array of pointers
};
struct fs_3 {
struct fs_2 **data; // array of pointers
};now the directory structure is an acyclic graph
- 2 or more directory entries can point to the same file or subdirectory
- can create links (symbolic & hard)
Hard Link #
gives different names to the existing file that all refer to the same content
cons cannot link across file systems
Soft Link #
a symbolic link is a file that contains the name of another file or directory OS searches the Inode of the original file based on the file name
cons deletion or moving the file causes the links to break
Components #
- I/O device
- I/O controller - the interface between the I/O devices and the internal system components; CPU, memory, etc
- I/O bus
The CPU interacts with the I/O controller through a set of interface registers called the I/O port. I/O port consists of four registers, called the status, control, data-in, and data-out registers.
- Control register - The control register can be used to give the command.
- Status Register - whether the current command has been completed or not, whether a byte is available to be read or not, Indication of device error.
- Data-in register - read by the host to get input.
- Data-out register - written by the host to send output.
DMA (Direct Memory Access) - DMA module controls the exchange of data between the main memory and an I/O module. It helps in reducing the CPU time by allowing the CPU to execute other processes while it transfers data across I/O devices
Device Driver - it is usually part of the OS kernel that contains the device-specific code to control an I/O device, which device manufacturer usually writes
Buffers #
Buffer is used to speeding up the process because the I/O was significantly slower than the CPU, so the CPU had to wait.
- Single buffer
- Double Buffer
- circular buffer
Protections & security #
Protection happens inside a computer, whereas Security considers external threats.
Components involved in protection #
- Subjects
- user, process, procedure, etc.
- Objects
- files, printer, Disk writer, etc.
- Operations
- read, write, etc.
Reference monitor validates access to objects by authorized subjects
Protection domain
- user
- supervisor
access matrix is used, it is a set of operations that a process executing in domain(i) can perform on Object(i)
Conclusion #
Hope this blog gives you the basic overall idea of the Operating System Happy learning 📖
Follow Kubesimplify on Hashnode, Twitter and Linkedin. Join our Discord server to learn with us.
DevOps, Development and CLoud related stuff Kubesimplify ambassador and a OSS contributor to various CNCF projects
Get new posts in your inbox.
Spotted a typo or want to improve this post? Edit on GitHub →